Common Issues¶
Below are common issues programmers face, sorted by problem type. Use the table of contents to navigate.
Restart
Code, electronics, and the robot can randomly stop working for no apparent reason. Consider restarting your computer, code, robot, or other components before attempting more intrusive troubleshootting steps.
Software Updates
The issue you found might be a commonly reported bug and has already been fixed in the latest version. Check the manufacturer's github or website to view the changelog and update.
Robot Operation¶
Packet Loss¶
Issue: Loss of control of robot (jerkiness); significant delay between joystick input and corresponding action; sudden robot movements when no input is being applied. The Driver Station log file reports packet loss with orange bars with respect to time.
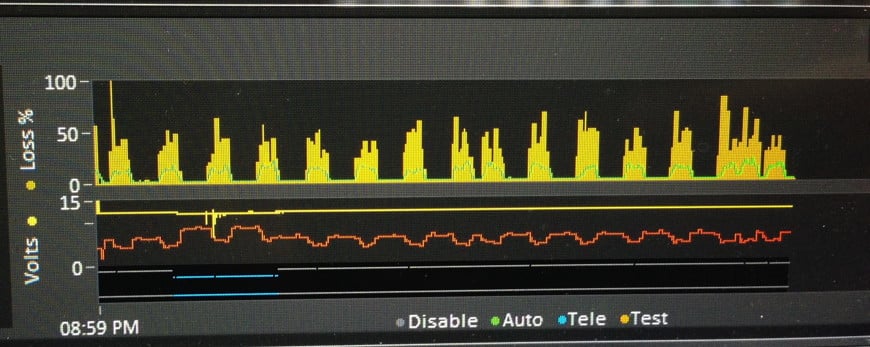
Cause: Lost communication packets between your computer/FMS and your robot's radio and roboRIO. Additionally, your robot could have lost power for a brief period before reconnecting.
Solution:
- During Competition Matches: Contact the field FTA/FTAA for assistance
- All other situations:
- Reduce surrounding wireless interference (hotspots/Wifi APs)
- Switch to a wired connection via USB or Ethernet
- Make sure the driver station laptop's battery mode is set to Performance and not Battery Saver
- Check power/data connections between radio and VRM, radio and roboRIO, battery to VRM, and battery to roboRIO
- Check that the ethernet port the router is connected to is not loose (consider hotgluing the connection for competition)
- Restart router/roboRIO
- Check for your code. Certain processes can lead to high packet loss. Common culprits include USB Cameras, badly configured PID loops, logging functions, etc. It's likely that the
periodic()loop is taking longer than 20ms to execute
No Communication¶
Programming¶
startcompetiton()¶
Limelight¶
PID¶
CAN¶
Electrical¶
Battery¶
Issue: Robot is browning out and/or behaving erratically when running the robot.
Cause: Low battery voltage or worn out battery. Alternatively, a motor is stalling.
Solution: Replace the battery with a fresh one from the battery charging station. Use a battery beak to check charge % (Full Charge is 130%) and battery resistance.
Battery Tips
- Full Charge: 130% (Anything over 115% should be enough)
- Lower internal battery resistance is better (<0.025 ohm)
- Check the Driver Station Log File for diagnostic information for battery voltage and power delivery via the PDP
- Use separate batteries for competition and practice/testing
Compressor¶
Issue: Compressor refusing to run even after checking the wiring and pneumatic system.
Solution: Make sure that the default compressor settings are not being overridden. Specifically, check that compressor.stop() is not present, as this will disable the automatic pressure control of the Pneumatics Control Module (PCM)
Compressors do not need to be instantiated to function at a basic level. Refer to the Javadocs to learn about advanced compressor functionality.